Problemstellung
Die Firma maxon entwickelt in einem Projekt in Zusammenarbeit mit der Hochschule Luzern – Technik und Architektur eine mobile Roboterplattform. Als Grundlage dienen Antriebe und Controller aus der eigenen Produktepalette (Abb. 1).
In interdisziplinärer Zusammenarbeit mit dem Fachbereich Maschinentechnik soll ein Prototyp-Konzept ausgelegt und ausgearbeitet werden, das modular aufgebaut und mit unterschiedlichen Sensoren und Aktoren erweiterbar ist. Zusätzlich soll der Beweis erbracht werden, dass sich die Plattform, bestehend aus den gegebenen Komponenten, per Xbox-Controller gezielt steuern lässt.
Lösungskonzept
Da noch keine Anwendung spezifiziert ist, sind die Anforderungen aus den vorgegebenen maxon Komponenten und dem aktuellen Marktangebot entstanden. Die Hochschule Luzern arbeitet bereits mit mobilen Robotern und konnte ihre wertvollen Erfahrungen in die Lösungsfindung einbringen.
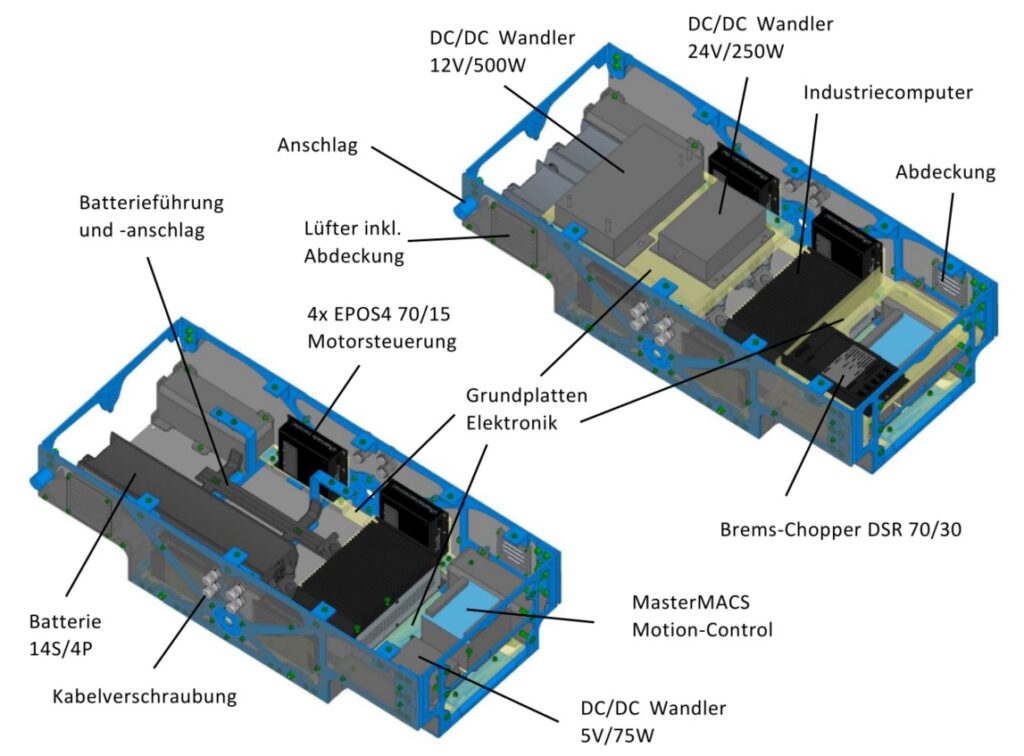
Aus unterschiedlichen Lösungsvarianten ist entschieden worden, dass das Lösungskonzept wie in Abb. 2 sichtbar, mit Luftreifen, einem beweglichen Fahrwerk und einer Lenkung per Drehzahldifferenz umgesetzt wird. Als übergeordnete Steuerung wird ein leistungsstarker Linux-Industrierechner verwendet, der autonome Projekte ermöglicht. Die Versorgungsspannungen werden mit unterschiedlichen DC/DC-Wandlern zur Verfügung gestellt, während die Energieversorgung mit zwei maxon Batteriesystemen gewährleistet wird (siehe Abb. 3).
Realisierung
Die Bewegungsbefehle des Xbox Controllers werden mit einer im ROS-Framework implementierten Anwendung ausgelesen und vom Industrie-PC per TCP over Ethernet an den Motion-Controller gesendet. Der Motion-Controller steuert und regelt die Motoren gezielt an.
Ergebnisse
Das Produkt dieser Bachelor-Thesis ist ein ausgearbeitetes Elektro-Konzept sowie die Beweiserbringung, dass die Motoren mit einem Xbox Controller gezielt manövriert werden können.
Ausgestattet mit Kommunikationsschnittstellen wie HDMI, USB, RJ45 und Wifi sowie unterschiedlichen Versorgungsanschlüssen (5V, 12V und 24V) kann die Plattform mit den unterschiedlichsten Sensoren und Aktoren ausgestattet werden. Zwei Lithium-Ionen-Batterien ermöglichen eine Betriebszeit von rund sechs Stunden.
Ausblick
In einer nächsten Projektphase werden die Komponenten von der Hochschule Luzern beschafft, der mobile Roboter zusammengebaut, in Betrieb genommen und getestet.
Studienbetreuer Prof. Dr. Björn Jensen
Preisstifter maxon advanced robotics & systems ag