Problemstellung
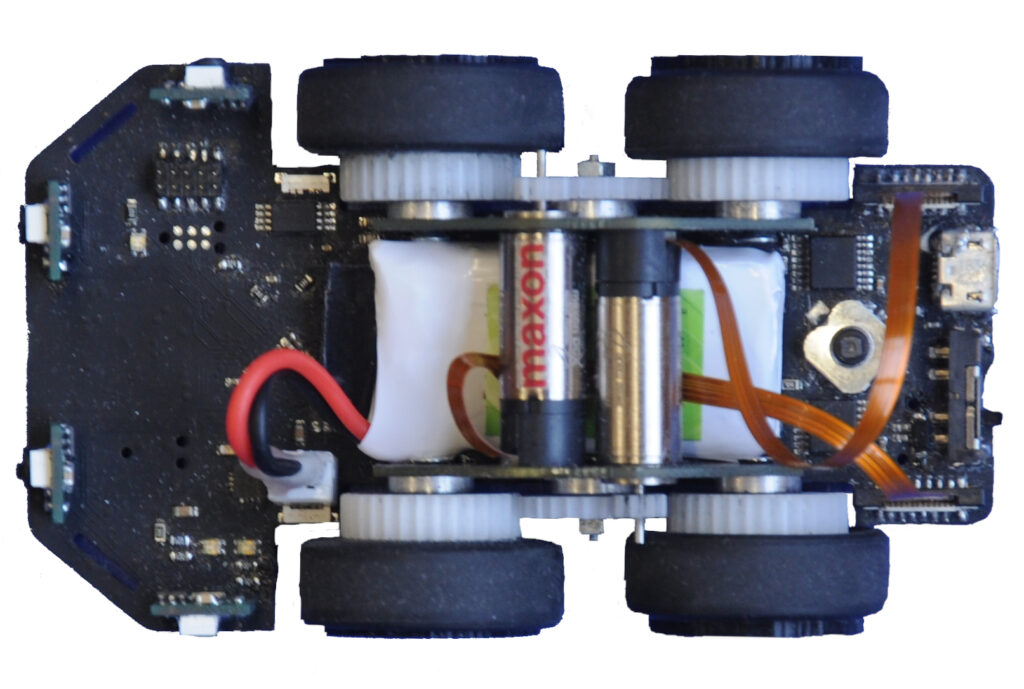
Der MC-Car V3 ist ein autonomes Roboterfahrzeug, entwickelt von der Hochschule Luzern in Zusammenarbeit mit der maxon motor ag. Er dient hauptsächlich zu Demonstrationszwecken.
Im Rahmen dieser Arbeit soll die Software vom MC-Car so erweitert werden, dass er ein unbekanntes Labyrinth autonom erkunden kann. Dafür verfügt das Roboterfahrzeug über einen Beschleunigungssensor, Drehgeber an den Motorenwellen und gegen beide Seiten und nach vorne gerichtet Infrarotdistanzsensoren.
Lösungskonzept
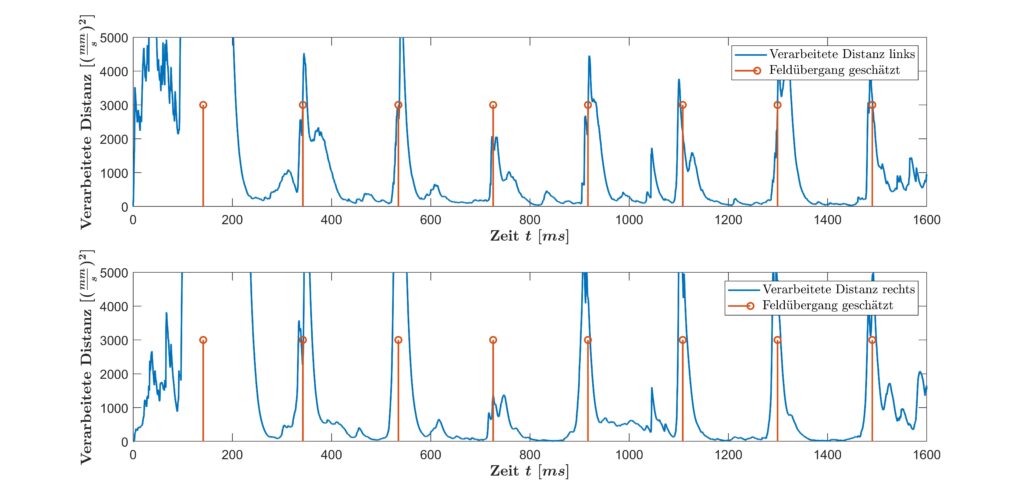
Vor der Implementierung erfolgen verschiedene Versuch mit dem MC-Car und Simulationen in MATLAB. Dabei wird ein Algorithmus zur Ausführung der vollständigen Erkundung entwickelt. Zur Orientierung im Labyrinth erfolgt eine Evaluation zur möglichen Erkennung von Kerben in den Labyrinthwänden bei Feldübergängen, durch die Verarbeitung der Seitendistanzmesswerte. Da diese Erkennung zu Fehleranfällig ist, erfolgt die Orientierung während der Exploration anhand der Messwerte des Beschleunigungssensors und der Drehgeber. Die entwickelte Kerbenerkennung dient aber zur präzisen Kalibrierung und Überprüfung der Feldübergangsabschätzung, während dem Entwicklungsprozess (siehe Abbildung 2).
Realisierung
Die Software für den MC-Car ist in C programmiert und besteht aus mehreren, verschachtelten Zustandsautomaten. Während der Implementierung erfolgten mehre Iteration, bei denen der Programmcode optimiert und entdeckte Fehlverhalten bereits wieder korrigiert wurden.
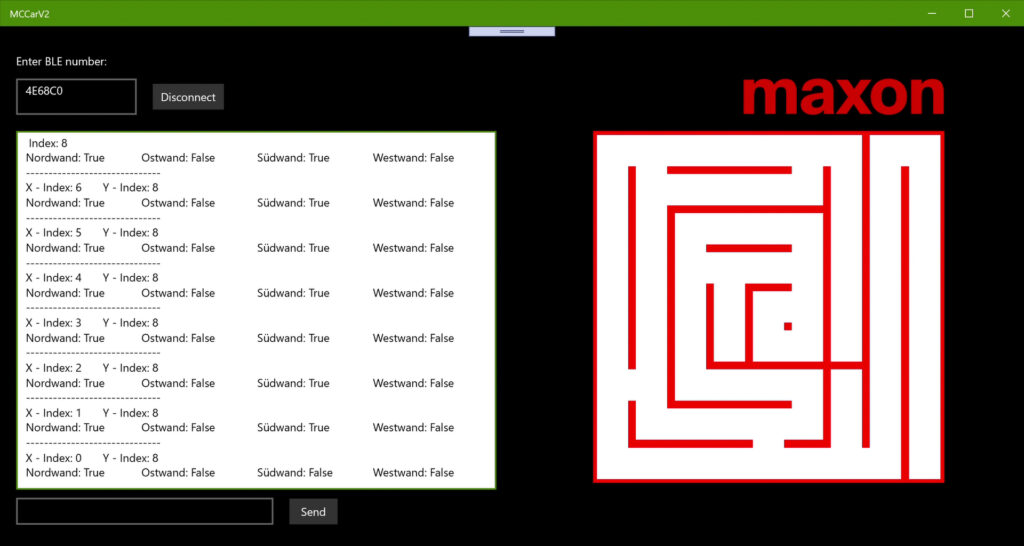
Zur Überprüfung der Erkundungsfahrt und des entwickelten Algorithmus dienen zum einen Kameraaufzeichnungen und zum anderen ein Grafikoberfläche, die das erkundete Labyrinth am PC visualisiert. Die Informationsübertragung vom Fahrzeug an den PC erfolgt via Bluetooth. Dadurch geschieht die Visualisierung live während der Erkundung.
Ergebnisse
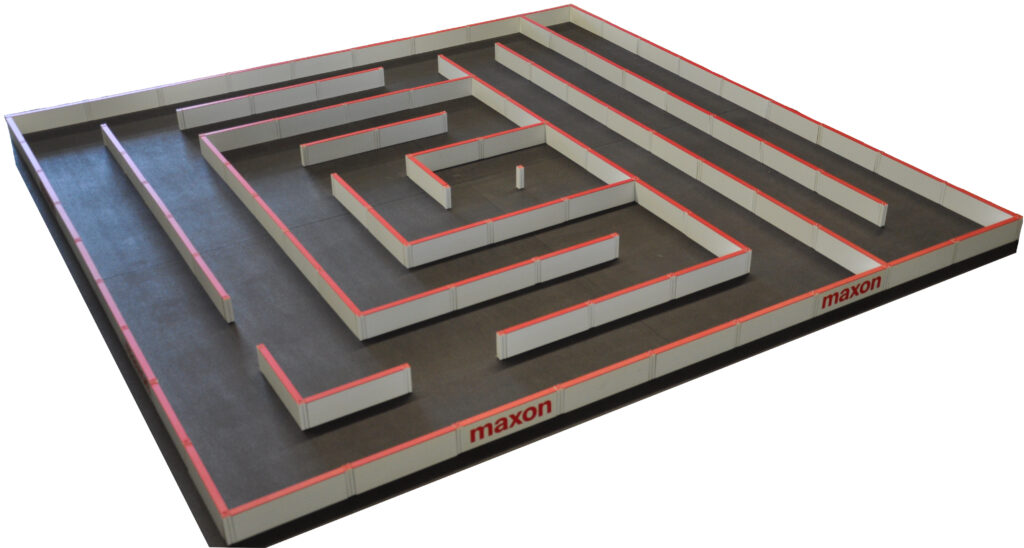
Die Erkundung von unbekannten Labyrinthen erfolgt in den meisten Fällen erfolgreich. Der entwickelte Algorithmus stellt die Erkundung aller möglichen Fahrwege sicher und führt den MC-Car am Ende der Erkundung zurück in das Startfeld. Das autonome Roboterfahrzeug verliert während der Fahrt seine Orientierung im Labyrinth nie. Es gibt jedoch Labyrinth-Konstellationen, in denen der MC-Car auf Grund von Winkelabweichungen stecken bleibt. Dieser Fehlerfall wird aber erkannt und angezeigt.
Die Exploration erfolgt mit einer Fahrgeschwindigkeit von 1 m/s. So benötigt die Exploration rund eine Minute bei einem quadratischen Labyrinth mit einer Seitenlänge von 1,44m.
Studienbetreuer Prof. Dr. Klaus Zahn
Preisstifter maxon advanced robotics & systems ag