Problemstellung
Diese interdisziplinäre Bachelor-Thesis soll ein Funktionsmuster einer selbstnivellierenden Bodenplatte realisieren. Im Bereich der Elektrotechnik und Informationstechnologie soll ein Sensor realisiert werden, welcher eine Neigung von +-40um aufnimmt. Dabei sollen verschiedene Methoden evaluiert und gegenübergestellt werden. Gemäss den Anforderungen wird eine dieser Methoden realisiert.
Lösungskonzept
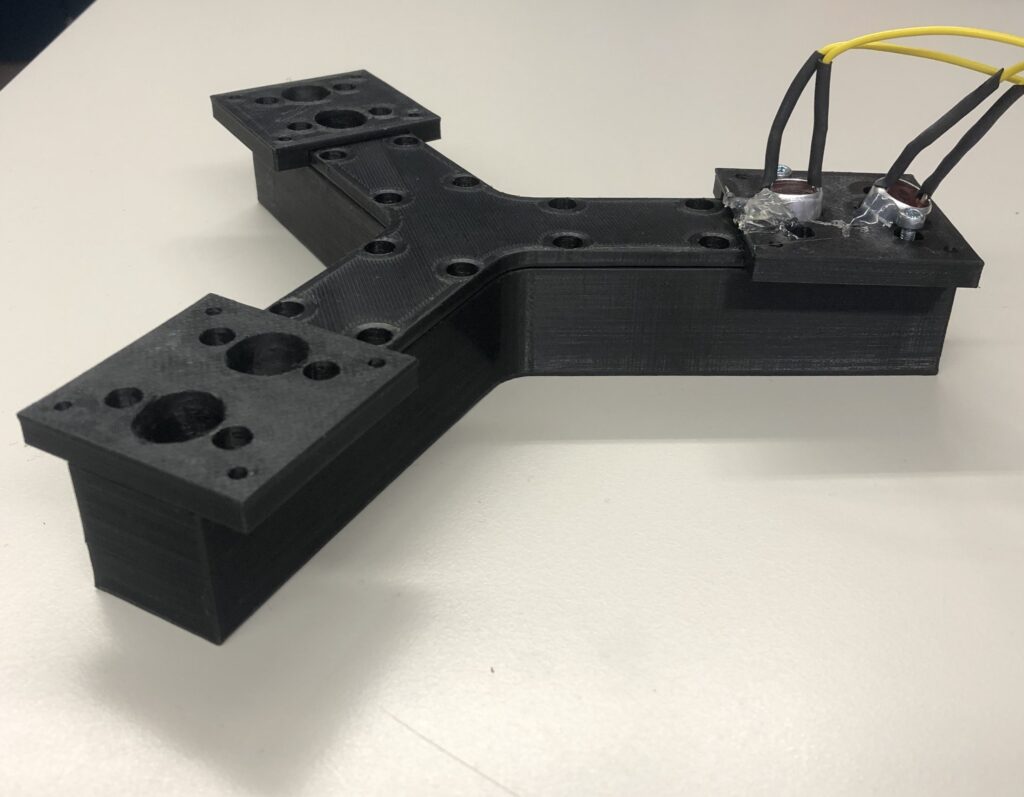
Mittels Ultraschallsensoren wird die Distanzmessung in der Vorrichtung, siehe Abbildung 1, realisiert. In dieser Vorrichtung wird Wasser gefüllt, was die reflektierende Fläche darstellt. Bei einem Niveauunterschied ist bei drei Sensoren eine unterschiedliche Höhe zu messen. Die komplette Elektronik und der Ultraschall wurden in einer Simulation, siehe Abbildung 2, simuliert. Dabei wird der Phasenunterschied zwischen gesendetem und empfangenem Signal über einen Microkontroller gemessen. Der Microkontroller erzeugt ein 40kHz Signal und steuert damit den Sender an, gleichzeitig startet ein Timer im Microkontroller um den Zeitunterschied und damit den Phasenunterschied zu messen. Die Software fragt mittels Pin-Abfrage (Polling) ob ein Signal beim Empfänger angekommen ist, ist dies geschehen, wird der Timer gestoppt. Der Microkontroller berechnet die Zeit in eine Distanz und gibt diese an ein LCD-Display aus.
Ergebnisse
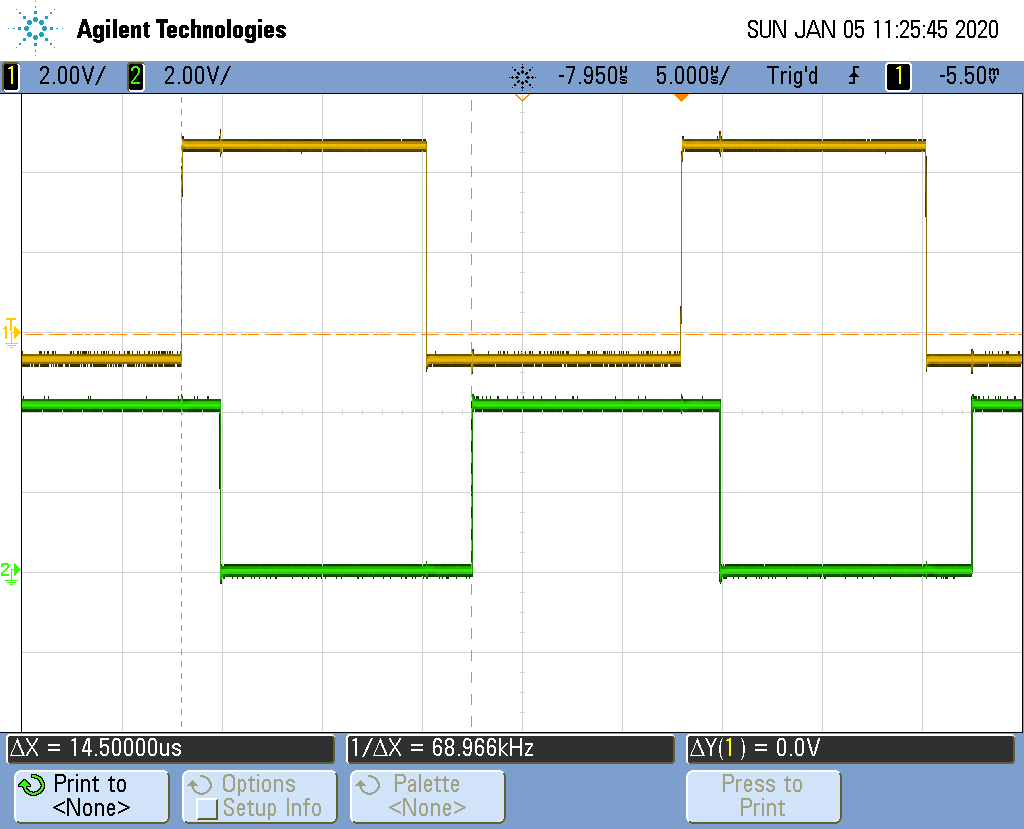
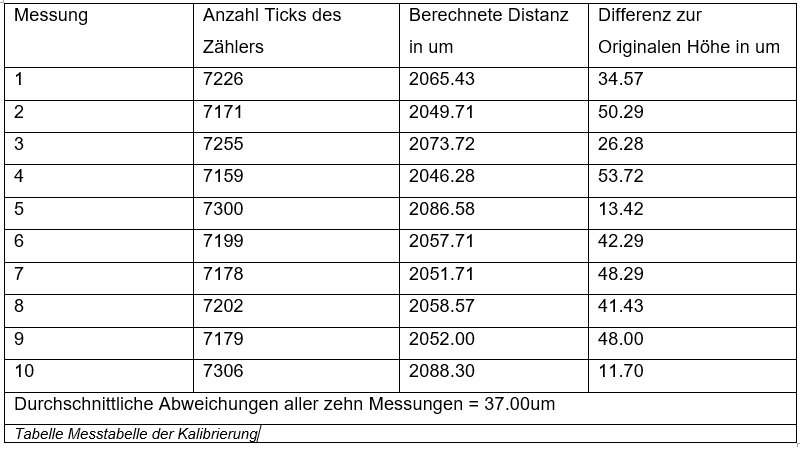
Der Sensor wurde wie in Abbildung 1 in die Vorrichtung montiert und eine Messung in der leeren Vorrichtung ausgeführt. Mittels eines Oszilloskops wurde eine Referenzmessung durchgeführt, dies ist in der Abbildung 3 zu sehen. Der Phasenunterschied beträgt 14.5us dies entspricht einer Distanz von ca. 2.1mm. In Abbildung 4 sind die Ergebnisse der Schaltung und dem Microkontroller zu sehen. Es ist eine Abweichung von 37.00um zu sehen, welche durch die Elektronik und Trägheit der Ultraschallsensoren entsteht. Mit dieser Abweichung kann nun auf die korrekte höhe von 2.1mm zurückgerechnet werden. So ist eine Genauigkeit zwischen 10 und 50um zu erkennen, womit das Lösungskonzept bestätigt werden konnte.
Ausblick
Dadurch das die Sensorik ein komplexes Thema ist, muss für das Funktionsmuster die Software fertiggestellt werden. Erst dann wird daraus eine Vorrichtung die eine Neigung von +-40um messen und korrigieren kann. Aus dieser Methode lassen sich unterschiedliche Anwendungen erarbeiten, zum Beispiel eine intelligente Wasserwaage.
Studienbetreuer Prof. Rolf Mettler
Preisstifter NyDee GmbH