Problemstellung
In dieser Arbeit geht es darum den sehbehinderten Menschen den Prozess, eines neuen Weges zu erlernen, zu vereinfachen. Dies soll mit verschiedenen Sensoren, wie Beschleunigungssensor ermöglicht werden. Dabei kann die blinde Person mit einem Betreuer den neuen Weg von Checkpoint nach Checkpoint ablaufen und der Weg wird mit den Sensoren aufgenommen und abgespeichert. Die Abweichung der berechneten Position soll kleiner als 2% sein. Dies ergibt bei einem maximalen Checkpoint-Abstand von 50 m eine Abweichung von einem Meter. In Gebäuden soll die maximale Checkpoint-Länge 25 Meter betragen, was einen Fehler von 0.5 m ergibt.
Lösungskonzept
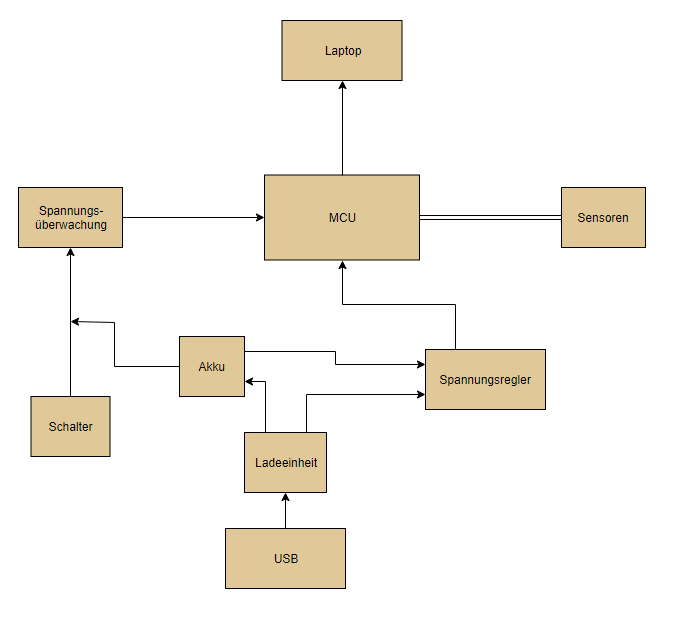
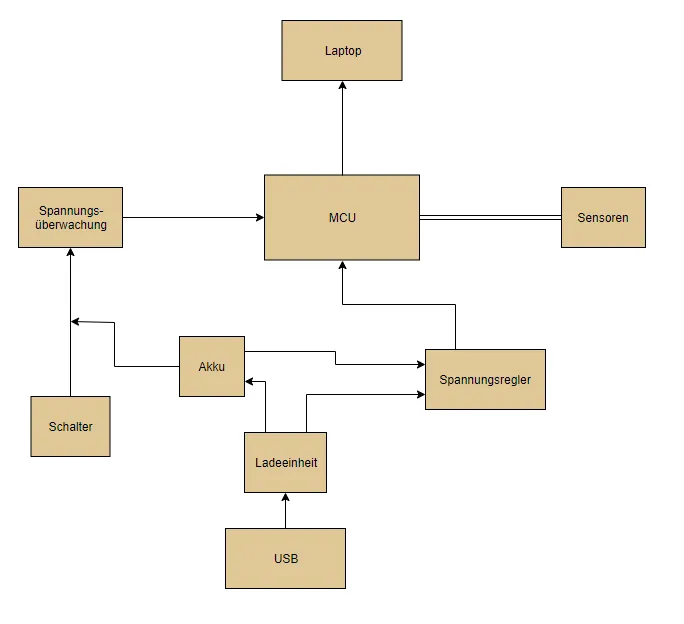
Mit einem USB-Kabel kann der Akku geladen und/oder das System gespiesen werden. Die Sensoren kommunizieren über einen SPI-Bus mit der MCU. Über den SPI sollen die Daten zur MCU geschickt werden und dort entweder verarbeitet oder direkt zum Laptop geschickt werden. Von der MCU kann via Bluetooth- USB oder Debug-Schnittstelle mit dem Laptop kommuniziert werden.
Realisierung
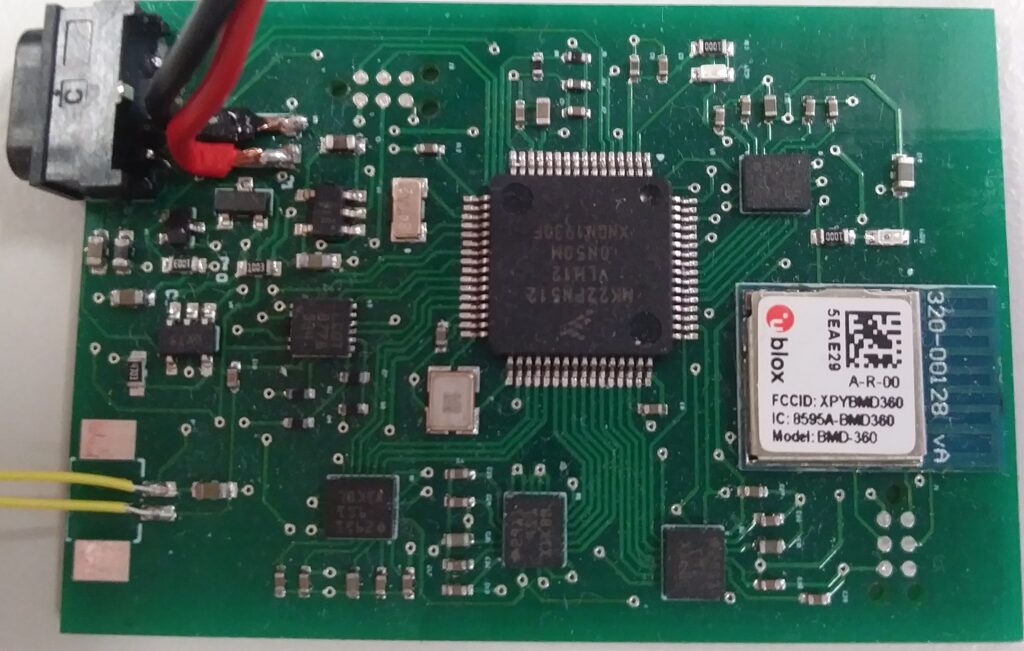
Um dies zu erreichen, wurde ein bestehender Print einer älteren Arbeit optimiert, die benötigten Komponenten ausgewählt und mit diesen den Print bestückt. Die wichtigsten Komponenten waren der Mikrocontroller und die Sensoren. Als MC wurde der MK22FN512VLH12 ARM Cortex-M4F von NXP verwendet. Bei den Sensoren wurde ein LSM9DS1TR genommen, welcher alle benötigten Sensoren enthält. Danach wurde ein C-Programm in der MCUXpresso IDE Umgebung geschrieben, das die Kommunikation zwischen Mikrocontroller und Sensoren ermöglichen soll.
Ergebnisse
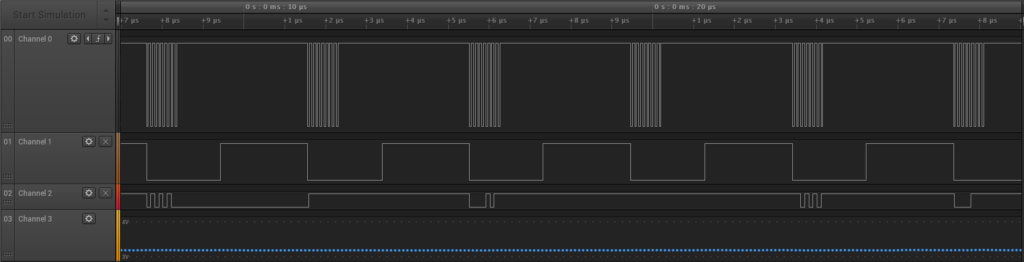
Zum Schluss wurden verschieden Tests durchgeführt, um die Funktionalitäten des Boards, des SPI und der Sensoren zu prüfen. Es konnten erfolgreiche Tests mit Hilfe eines Logic Analyzers durchgeführt werden, die auf die Funktionalität des Boards und eine erfolgreiche Kommunikation per SPI schliessen. Es konnte jedoch im Rahmen dieser Arbeit keine genaueren Aussagen über die Genauigkeit der Sensoren gemacht werden.
Ausblick
Der letzte Test war das Lesen der Sensor-Daten.
In einem nächsten Schritt könnte man die Algorithmen noch etwas funktional ausbauen, um die Auslesung der Sensoren per Interrupt zu machen, um damit die Werte für die Aufzeichnung von einer Wegstrecke berechnen zu können.
Studienbetreuer Prof. Dr. Markus Thalmann
Preisstifter Hochschule Luzern Institut Elektrotechnik