Problemstellung
Die Ansteuerelektronik für eine Linearachse in den Heliotis Messsystemen wird zurzeit vom Motorenhersteller bezogen. Diese hat jedoch einige Limitationen für die Anwendung, weshalb in einer vorherigen Arbeit (Industrieprojekt „Motor Regelung für 3D-Messgerät“, 2018) dafür bereits in einem Versuchsaufbau eine eigene „Motion Control-Elektronik“ mit Developmentboard und selbst gebauter Treiberelektronik getestet sowie die Regelung auf einem Microcontroller implementiert wurde. Es sollte nun ein HW-Prototyp sowie SW realisiert werden, die sich sauber in das Heliotis Ecosystem integriert liessen.
Lösungskonzept
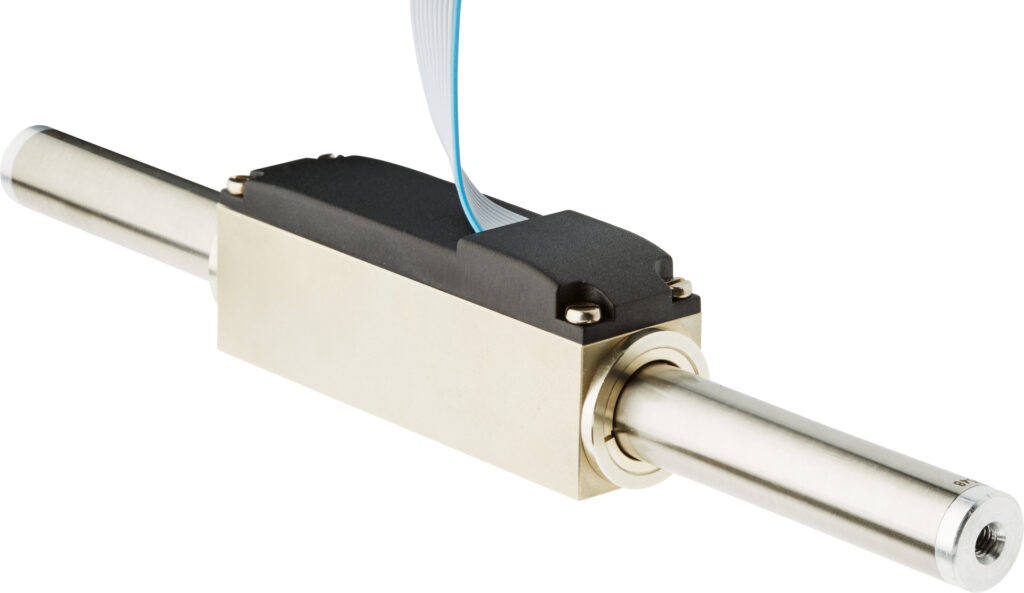
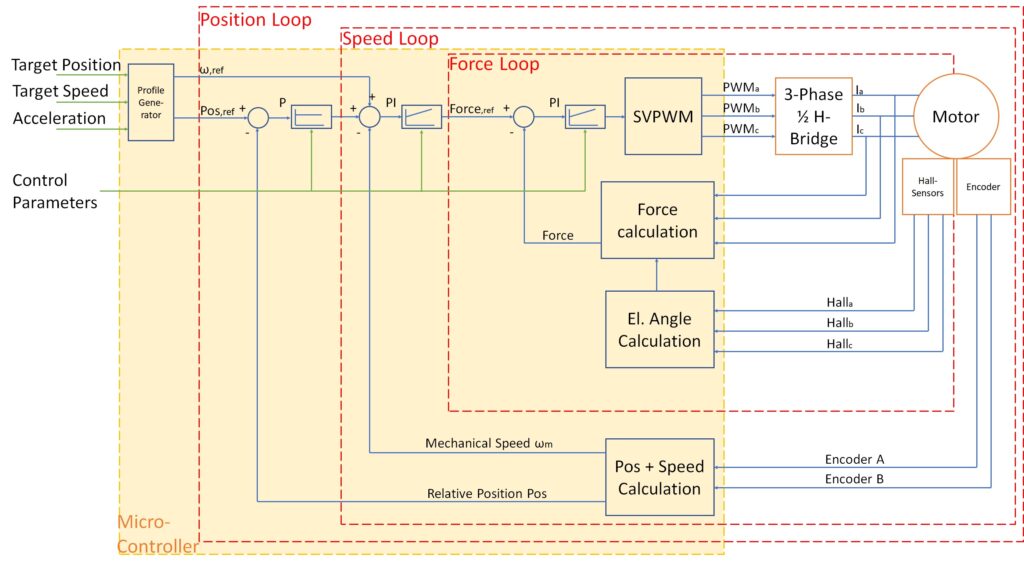
Der verwendete ARM Cortex M4 basierte Mikrocontroller steuert über eine Treiberstufe einen dreiphasigen Linearmotor an. Als Feedback für die dreistufige Regelung werden die Ströme der Motorphasen sowie die relative Position des Motors gemessen. Die Strommessung wurde bisher mit Hallsensoren durchgeführt und wurde durch ein resistives Messsystem ersetzt um die magnetische Empfindlichkeit zu reduzieren. Die Positionsmessung erfolgt über einen optischen Encoder mit einer Auflösung von 250nm, welche mit einem Interpolator auf 12.5nm erhöht wird.
Realisierung
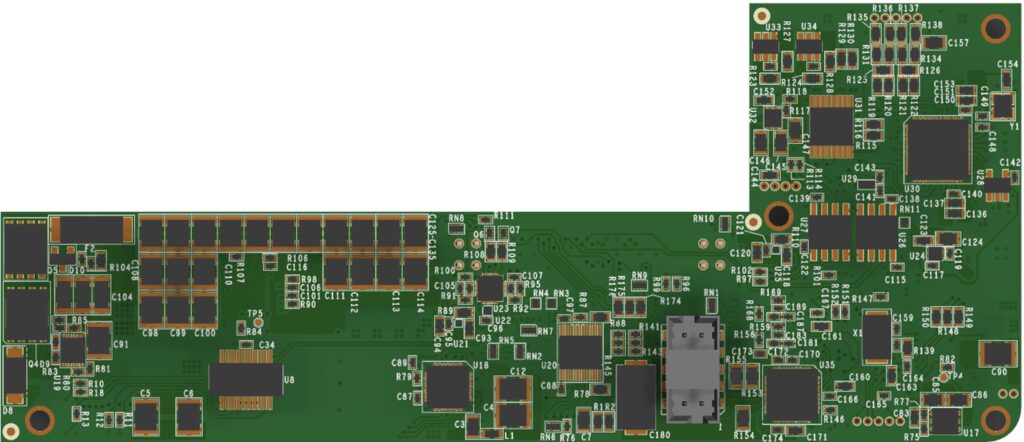
Der Microcontroller sowie Treiberelektronik und Feedbackschaltung wurden auf einer bestehenden Leiterplatte integriert. Bereits vorhandene Schnittstellen konnten übernommen und gegebenenfalls angepasst werden. In der Software wurde für die Regelung des Motors eine Statemachine implementiert. Die Ansteuerung des Mikrocontrollers erfolgt über eine UART Schnittstelle, über welche Parameter wie die Fahrtgeschwindigkeit übergeben werden oder der Motor zu einer gegebenen Position fahren gelassen wird.
Ergebnisse
Die Leiterplatte, welche für dieses Projekt entwickelt wurde, konnte den Anforderungen entsprechend gefertigt und in Betrieb genommen werden. Auch die Software ist auf einem Stand bei dem alle Pflichtanforderungen erfüllt wurden. So können über die UART Schnittstelle Geschwindigkeit und Zielposition für den Motor übertragen werden und der Motor fährt mit konstanter Geschwindigkeit an die gewünschte Position. Die Regelung des Motors muss in Zukunft noch genauer charakterisiert und weiter verbessert werden um eine Geschwindigkeitsabweichung von maximal 1% über eine Fahrtlänge von einigen mm zu erreichen. Momentan wird eine Abweichung von +/- 2% gemessen.
Studienbetreuer Prof. Dr. Markus Thalmann
Preisstifter Heliotis AG