Problemstellung
In einem Vorprojekt wurde eine Funkfernsteuerung entwickelt, die über ein eigenes Protokoll mit einer Bodenkontrollstation (Ground Control Station, GCS) kommuniziert. Ziel dieser Arbeit war es, den dazugehörigen Funkfernsteuerungsempfänger zu entwickeln und das gesamte Funkkommunikationssystem an ein spezifisches Endsystem, ein Modellbauflugzeug, zu adaptieren. Über den ‘Uplink’ sollen die Funkfernsteuerungskommandos an den Empfänger gesendet werden, der damit die BLDC- und Servomotoren ansteuert. Ausserdem soll es über ein Human-Machine-Interface von der GCS aus möglich sein, aktiv Steuerkommandos zur Flugkontrolle senden zu können.
Lösungskonzept
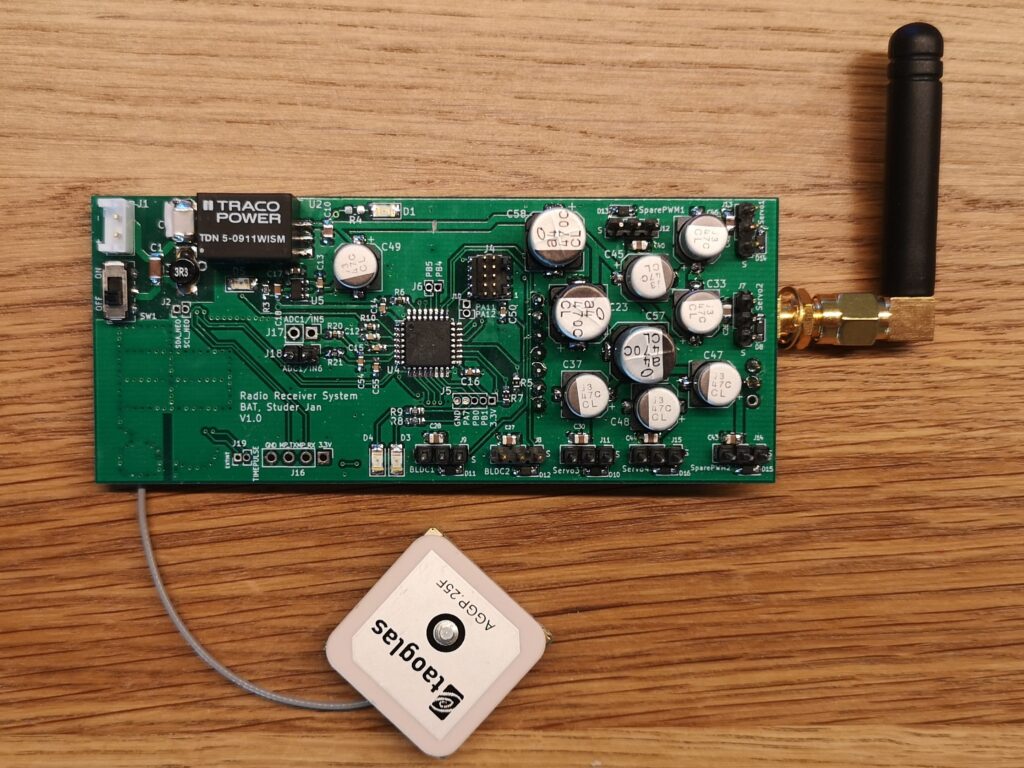
Zu Beginn des Projektes wurde ein Hardware-Konzept für einen generischen Funkfernsteuerungsempfänger (siehe Abb. 1) entwickelt. Ein Mikrocontroller der Firma STM kommuniziert über die UART-Schnittstelle mit dem Funkmodul, welches über Frequenzhopping im ISM-Band mit 100mW Ausgangsleitung sendet. Für die Flugkontrolle ist ein externes PWM-IC (PCA9685) zuständig, welches über I2C vom Prozessor angesprochen wird. Das Software-Konzept basiert auf einem FreeRTOS, in welchem insgesamt fünf verschiedene Tasks ausgeführt werden. Zwei Tasks kümmern sich um die bidirektionale, serialisierte Kommunikation. Ein weiterer Task ist für die Akkuspannungsüberwachung zuständig. Die Flugkontrolle wird ebenfalls in einem separaten Task realisiert, der die Uplink Funkdaten in PWM-Signale umrechnet. Der letzte Task kümmert sich um die gesamte Programmablaufsteuerung.
Realisierung
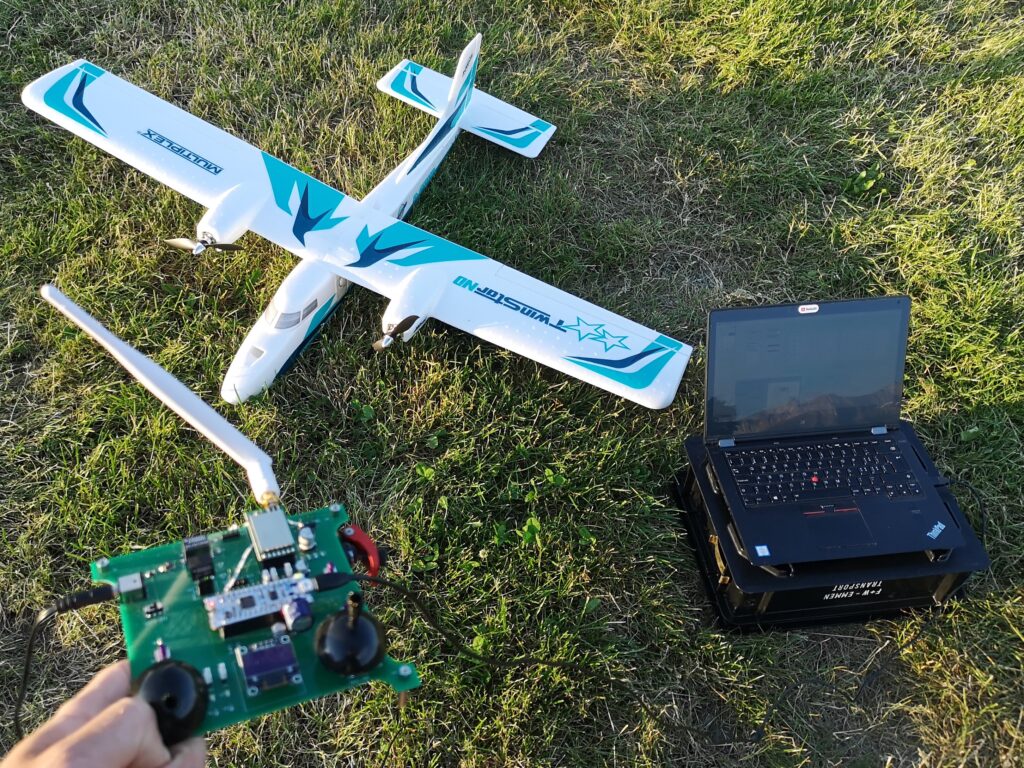
Die entwickelte Funkempfänger-Hardware wurde in das Modellflugzeug integriert und an das bestehende System adaptiert (siehe Abb 2). Die bestehende Funkfernsteuerungssoftware wurde ebenfalls auf ein FreeRTOS portiert und weitere Tasks für die bidirektionale Kommunikation implementiert. Auf Seiten der GCS wurde mit einer C# Wrapperklasse für Gaming-Devices, ein Treiber für einen Logitech-Joystick implementiert. Diese Joystickdaten werden nun über die Funkfernsteuerung, die als Gateway arbeitet, an den Empfänger weitergeleitet.
Ergebnisse
Schlussendlich konnte das gesamte Funkkommunikationssystem in einem Flight-Test validiert werden. Das Modellflugzeug lässt sich mit einer Aktualisierungsrate von 30Hz in zwei verschiedenen Flugmodi, steuern. Entweder werden die Steuerkommandos über den Joystick von der GCS aus aufbereitet oder direkt auf der Fernsteuerung selbst.
Studienbetreuer Prof. Styger Erich
Preisstifter StartUp