Problemstellung
Eine Fussballplatzbeleuchtung verliert infolge Alterung und Verschmutzung an Beleuchtungsstärke. Um eine ausreichende Beleuchtung zu gewährleisten, ist eine solche Beleuchtung alle fünf Jahre gemäss den Normen der Schweizer Licht Gesellschaft (SLG) an 77 Messpunkten zu überprüfen. Bisher werden diese Messungen manuell von zwei Personen durchgeführt. Um diesen Prozess effizienter zu gestalten, sollen diese Messungen mithilfe einer Drohne autonom durchgeführt werden können.
Lösungskonzept
Die Positionsgenauigkeit einer herkömmlichen Drohne mit GPS ist unzureichend, deswegen wurde eine Drohne verwendet, welche über Real Time Kinematic (RTK) verfügt. Dabei handelt es sich um eine Ergänzung zum GPS, bei dem eine Bodenstation kontinuierlich Korrektionsdaten an die Drohne sendet. Zum Loggen der Positionsinformation, sowie zum Einlesen des Beleuchtungsmessgerätes wurde die Drohne um ein Raspberry Pi ergänzt. Zur Erzeugung des Messrasters sind drei Eckpunkte des Fussballplatzes nötig, diese wurden aus Onlinekartenmaterial extrahiert.
Realisierung
Die Koordinaten der 77 Messpunkte wurden mithilfe einer Drittanbieter-Software in ein passendes Format konvertiert, so dass die autonome Mission mithilfe der Android-Applikation des Drohnenherstellers geladen und ausgeführt werden konnte. Auf dem Raspberry Pi werden die Positionsinformationen der Drohne, sowie die Messwerte des Beleuchtungsmessgerätes mit einem Zeitstempel versehen gespeichert.
Ergebnisse
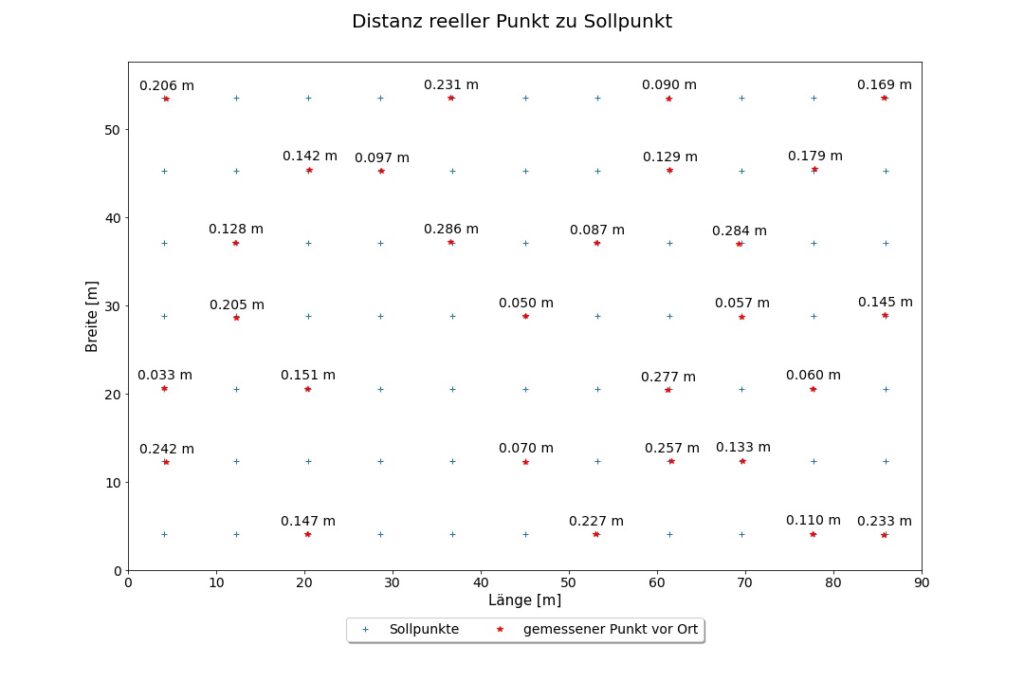
Ein Test der Positionsgenauigkeit zeigte auf, dass Abweichungen in der Horizontalen von bis zu 1.25 Metern auftauchten (bei Extraktion der Eckpunkte aus Onlinekartenmaterial). Die geforderte Genauigkeit in der Horizontalen betrug 0.5 Meter. Als Folge daraus wurden benötigten Eckpunkte des Fussballplatzes vor Ort mit der Drohne eingelesen, was zu deutlich besseren Resultaten führte (siehe Abbildung 3).
Ausblick
Da die Eckpunkte vor Ort extrahiert werden müssen, um die Positionsgenauigkeit zu erreichen, lässt sich die Applikation des Drohnenherstellers nicht verwenden. Somit muss die gesamte Missionslogik auf das Raspberry Pi oder eine eigene Android-Applikation ausgelagert werden.
Studienbetreuer Dr. Andrew Paice
Preisstifter CKW