Problemstellung
Die Firma CURADEN stellt verschiedene Produkte im Bereich Dentalhygiene her. Es soll zu einer bestehenden Liegefläche eines Zahnarztstuhls der Antrieb ergänzt werden. Der grobe Aufbau der Mechanik dazu ist vorgegeben und wird von einem Studenten der Maschinentechnik entwickelt.
Der Industriepartner möchte die Höhe, wie auch der Winkel der Rückenlehne und der Sitzfläche einstellbar haben. Es soll eine Überbelastung festgestellt werden und in einem auslesbaren Speicher abgelegt werden. Es soll zur Demonstration ein Modell im Massstab 1:4 anstatt dem Original gebaut werden. Das Projekt dient als Vorbereitung für eine Industrialisierung von ca. 1000 – 2000 Stück pro Jahr.
Lösungskonzept
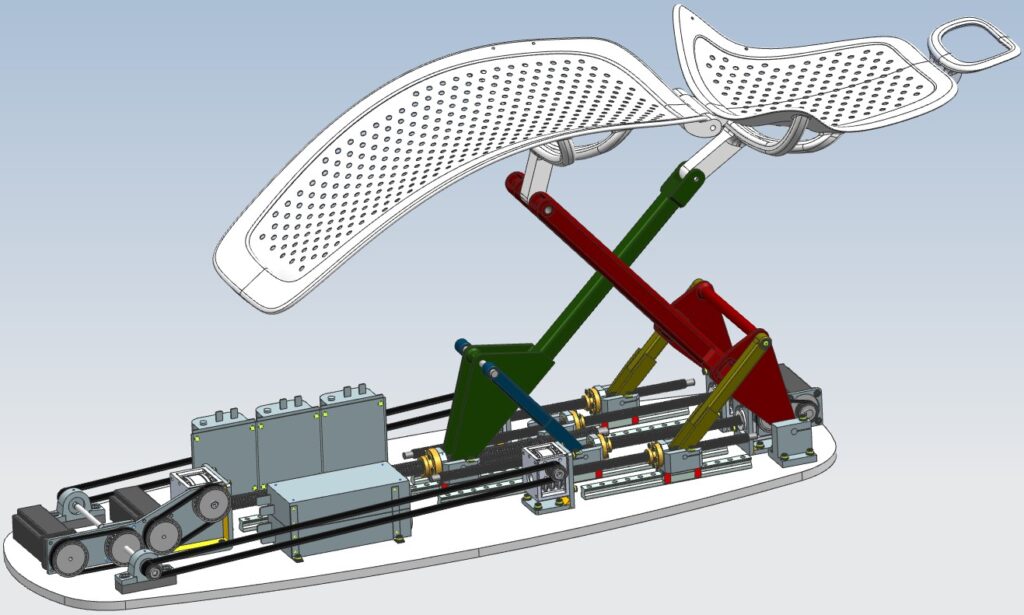
Die Mechanik wird mit drei bürstenlosen Gleichstrommotoren bewegt. Die roten Stangen sind fest, während gelb, grün und blau verschoben werden können (siehe Abb. 1). Die Steuerung übernimmt ein Mikrocontroller. Die Höhe des Stuhls, wie auch die Position der Spindeln wird optisch gemessen. Als Endschalter werden Hallsensoren eingesetzt. Die Belastung wird mit einem Dehnungsmessstreifen gemessen und als Logdaten in einem Flash abgelegt. Der Zeitstempel kommt vom Mikrocontroller internen Real Time Clock. Die Software läuft mit dem Betriebssystem FreeRTOS.
Realisierung
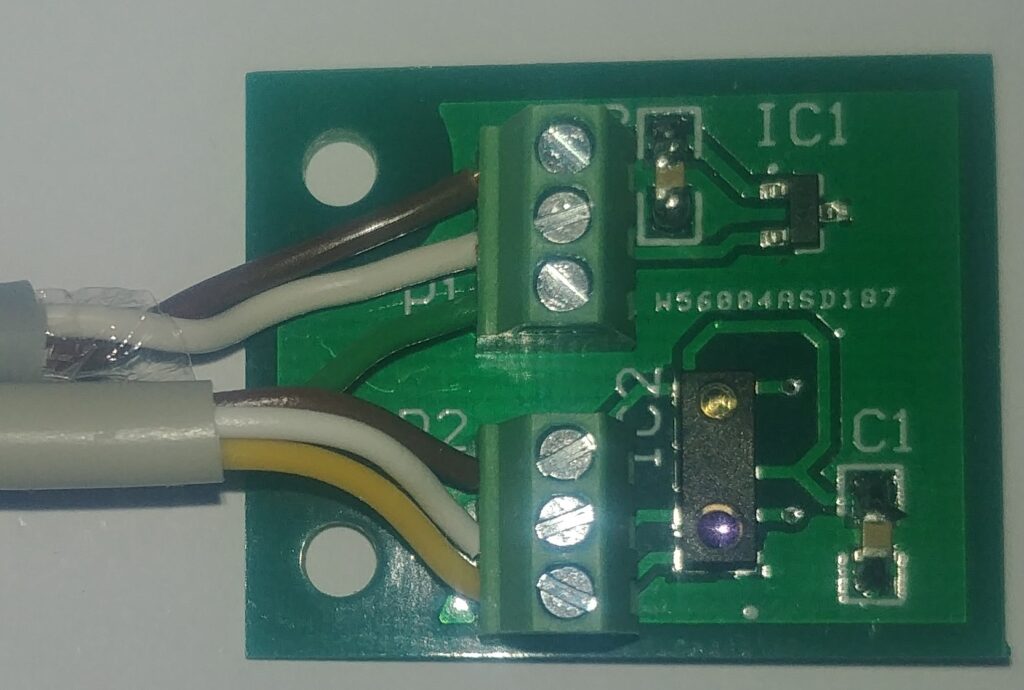
Es wird eine Leiterplatten hergestellt, wo die Sensoren und die Motorentreiber an den Mikrocontroller angeschlossen sind. Für die Distanzmessung und die Endschalter wird eine gemeinsame Leiterplatte benötigt (siehe Abb. 2).
Die Motorenansteuerung läuft als Task in einer Schleife. Sobald eine Positionsänderung vorliegt, wird die Regelung gestartet und die Motoren werden entsprechend angesteuert. Fehlermeldungen von allen Modulen werden in einer Queue abgelegt. Die Logfunktion nimmt die Meldungen raus und legt sie in ein Logfile im Flash ab. Über die Konsole kann das Log ausgelesen werden.
Ergebnisse
Durch Lieferschwierigkeiten der Motoren und der Mechanik konnte kein Modell erstellt werden. Somit konnten auch keine Systemtests durchgeführt werden. Durch Zeitmangel konnten der Treiber für I2C und SPI nicht korrekt zum Laufen gebracht werden. Für die Industrialisierung summieren sich die einzelnen Komponenten einen Preis von knapp 3100 CHF pro Stück bei einer Stückzahl von 1000. Dabei fallen die Motoren, Motorentreiber und Netzteile am meisten ins Gewicht. Die Mechanik kostet ca. 6800 CHF.
Studienbetreuer Prof. Erich Styger
Preisstifter CURADEN AG