Problemstellung
Die Balluff AG ist ein namhafter Hersteller von Sensoren und Netzwerkprodukten für die Industrieautomation. Eine neue Generation von 3D Sensoren für die Echtzeit Qualitätsüberwachung in der industriellen Produktion soll entwickelt werden. Die Sensoren sollen eine integrierte 3D Objektdetektion enthalten. Für diese Objektdetektion soll ein Prototypencode zur Auswertung der beiden 3D Deskriptoren, FPFH und B-SHOT, realisiert werden. Die Robustheit gegen Skalierung und verschiedene Ansichtswinkel wird für industrierelevante Objekte untersucht.
Lösungskonzept
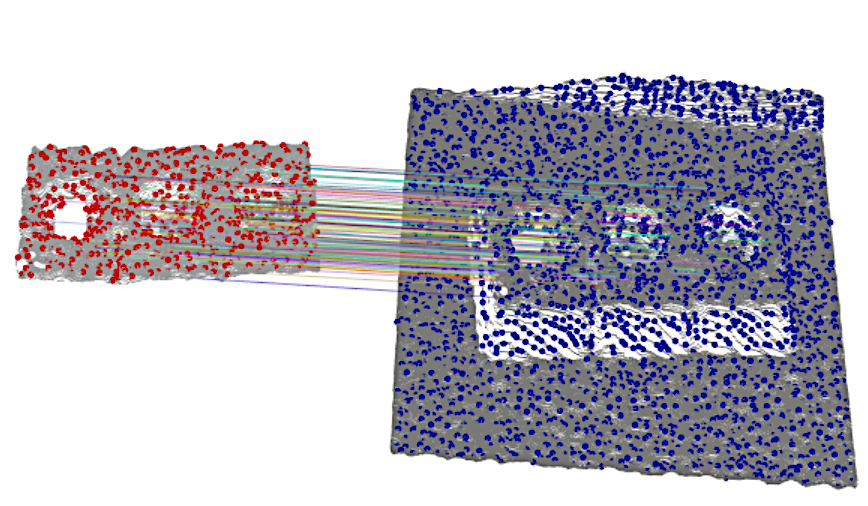
Die Auswertung erfolgt in zwei Schritten und lehnt sich stark an die Auswertungen von Guo et al. resp. Buch et al. an. Guo et al. verwenden einen Threshold für die nächster Nachbar Distanzrate (NNDR), ab welchem ein Punkt als Match gilt. Die NNDR ist das Verhältnis des ähnlichsten Deskriptors zum zweitähnlichsten. Buch et al. suchen einen Threshold an gematchten Punkten zwischen einem Modell und der Szene, ab welchem ein Objekt als erkannt gilt. Diese Auswertung ist bedeutender für die Anwendung.
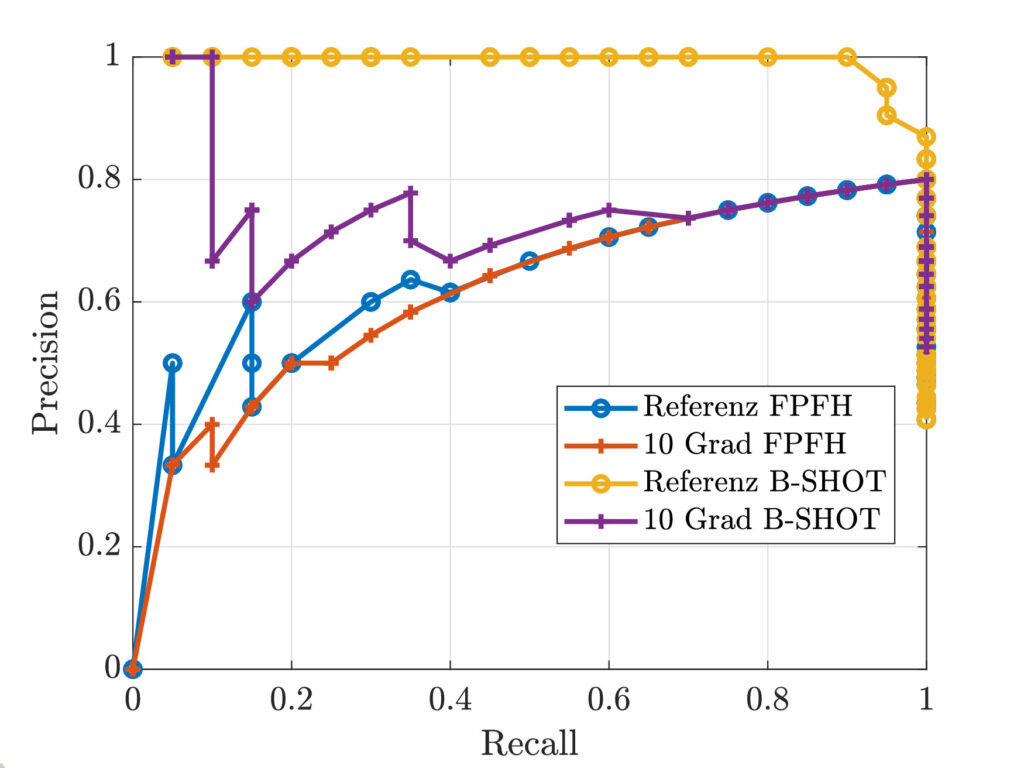
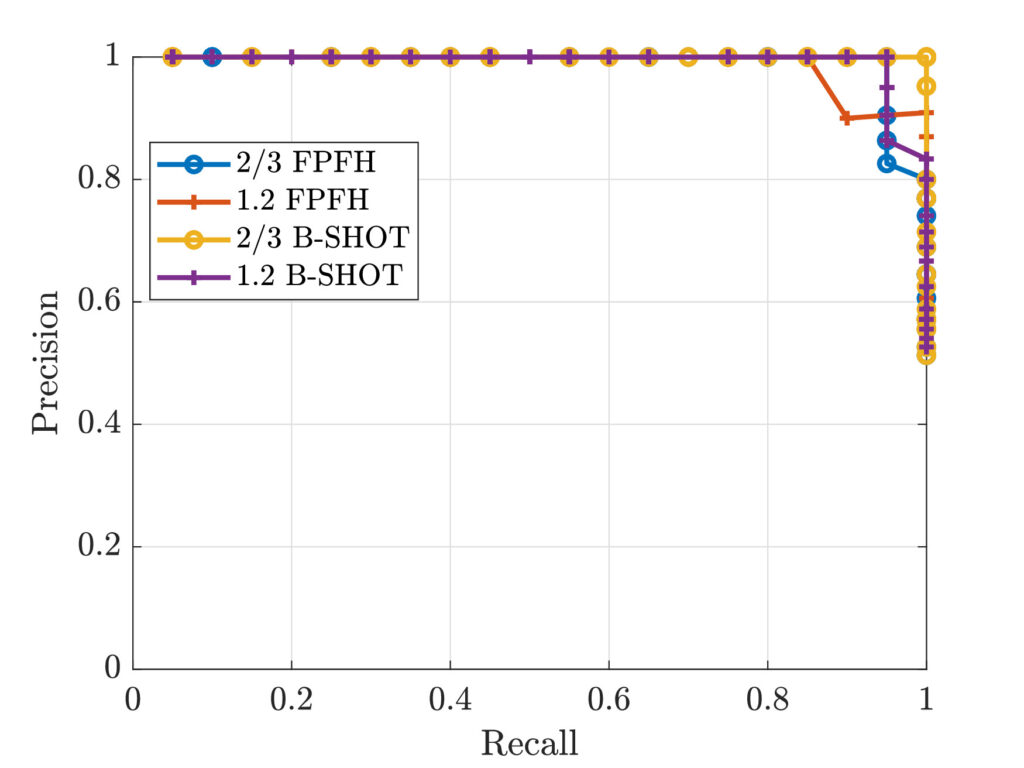
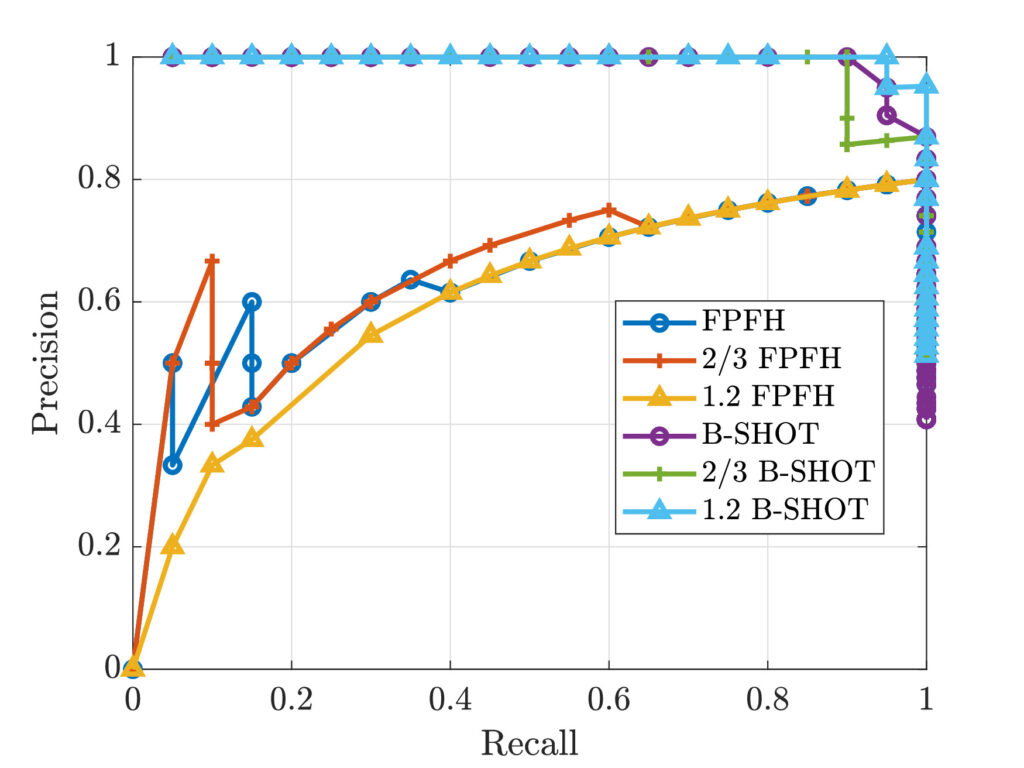
Die Resultate werden in Precision—Recall (PR) Kurven dargestellt. Die Precision zeigt das Verhältnis der korrekten Matches zu allen Matches, der Recall das Verhältnis zwischen allen korrekten Matches und allen möglichen Matches. Zum Schluss wurde ein zeitlicher Vergleich der einzelnen Programmabschnitten sowie der beiden Deskriptoren gemacht.
Realisierung
Für die Implementierung in C++ wurde die Point Cloud Library (PCL) verwendet. Die PCL enhält eine Vielzahl an state-of-the-art Algorithmen für die 3D Bildverarbeitung. Die anschliessende Auswertung und das Plotten der PR Kurven wurde in MATLAB realisiert.
Ergebnisse
Der B-SHOT Deskriptor ist über alle Auswertungen gesehen der besser geeigente Deskriptor. Er ist rauschresistenter und weniger anfällig gegen Skalierung, wobei die Skalierung auf beide Deskriptoren keinen markanten Einfluss hat. Ebenfalls kann mit dem B-SHOT Deskriptor eine bessere Klassifikation desselben Objekts mit verschiedenen Ansichtswinkeln erzielt werden. Des Weiteren ist die Berechnung des B-SHOT Deskriptors unter Berücksichtigung gleich vieler Punkte durchschnittlich um das Vierfache schneller als die Berechnung des FPFH Deskriptors. Durch die Verwendung des Algorithmus RANSAC, welcher Ausreisser eliminiert, kann die Klassifikation erheblich verbessert werden.
Studienbetreuer Dr. Patric Eberle
Preisstifter Balluff AG