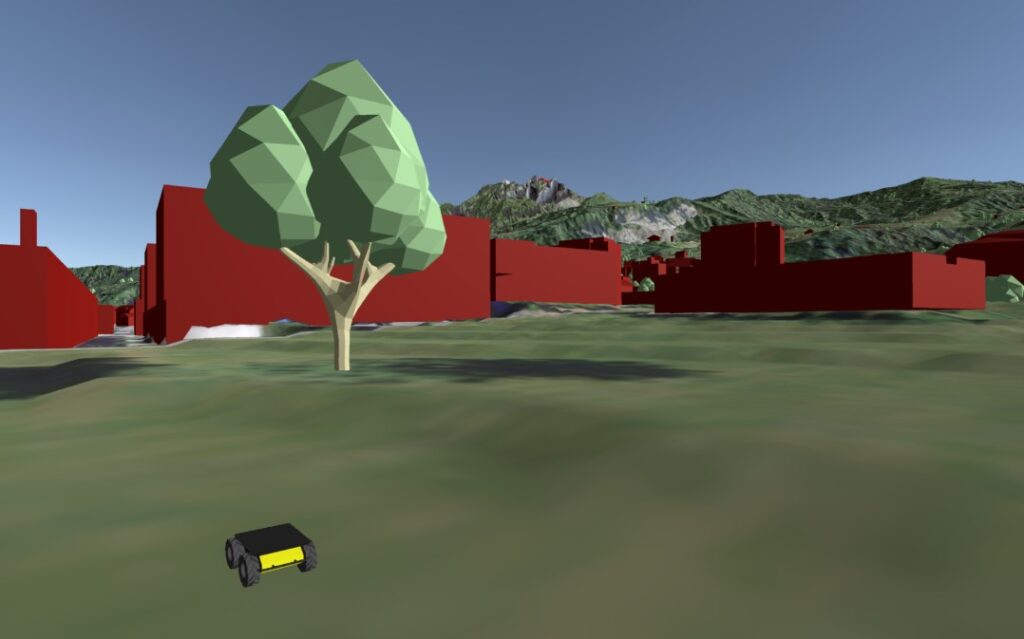
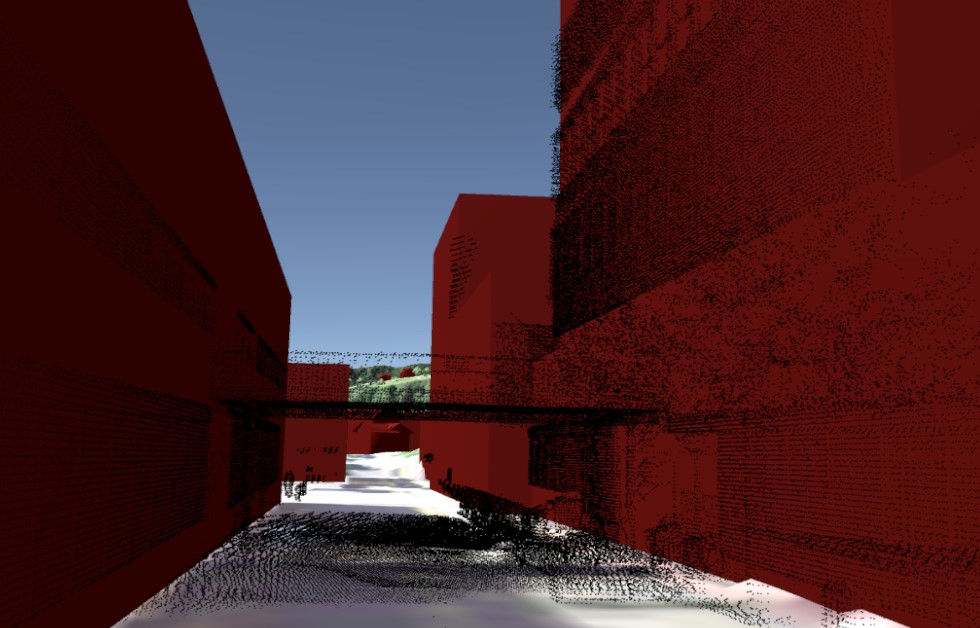
In this work an interface of VR to mobile robots is developed. For this task, the VR headset HTC Vive Cosmos is used. The interface can be applied to any mobile robot based on the Robot Operating System (ROS). The virtual environment (VE) viewed by the operator with the VR headset, as well as the controlling of the robot, is realized with the game engine Unity. The VE is visualized with offline data by Swisstopo. Additionally, sensors on the robot provide information of the environment at runtime. These sensors are 360° camera, stereo vision camera, and 3D light detection and ranging laser scanner. These sensors are realized and integrated in the interface and tested separately. A system test on an actual robot is pending. In the VE, the operator can intuitively set a goal position by the controller which the robot can reach autonomously. An evaluation with several test subjects confirms the advantage of perception of the environment and the controlling of the robot while using VR.
Studienbetreuer: Markus Thalmann