Roboter-Arm (mit Annin Robotics Software)

Kontakt: MediaDock
Wir haben im MediaDock mehrere 6-Achsen-Roboter Arme von Annin Robotics. Einer davon wird per Annin-Robotics-Software angesteuert. Hier können Positionen aufgezeichnet und zu wiederholbaren, automatisierten Bewegungen verknüpft werden. Ausserdem kann der Arm durch verschiedene, pneumatische Aufsätze ergänzt werden.
Diese Lösung eignet sich vor Allem wenn du…
…eine bestimmte Bewegung
…einen vorgezeichneten Pfad aus einem digitalen Dokument auf zwei Achsen abfahren willst (z.B. um den Arm als «Zeichenroboter» zu nutzen).
Falls diese Lösung nicht zu deinen Bedürfnissen passt, kannst du dich hier über die andere Steuerungssoftware informieren.
Vorbereitung
Arm
Als erstes schalltest du den Arm an. Schliesse ihn dafür mit dem entsprechenden Netzteil an eine Stromquelle an. Achtung: Sobald der Roboter am Stromnetz hängt, darf die Abdeckung des grauen Gehäuses auf keinen Fall entfernt werden.
Anschliessend findest du den AN/AUS-Schalter an der Seite des Gehäuses.
Sobald der Arm läuft, kannst du das Board der Maschine über die USB C-Buchse mit einem Kabel an den PC anschliessen.
Kalibrierung
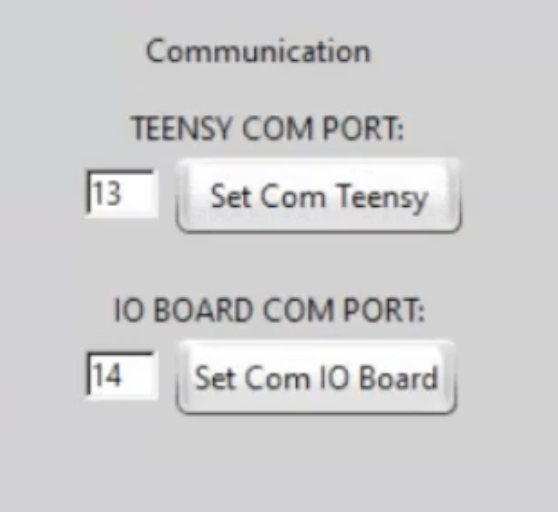
Öffne als nächstes die Annin-Robotics-Software. Im oberen linken Bereich des Fensters kannst du den Verbindungsstatus sehen. Falls du die Warnung «UNABLE TO ESTABLISH COMMUNICATION WITH TEENSY 4.1 CONTROLLER» angezeigt bekommst, können das Board und dein PC noch nicht miteinander kommunizieren. Prüfe, ob alle Kontakte richtig eingesteckt sind. Falls das Problem bestehen bleibt, musst du den richtigen COM Port auswählen. Gehe dafür in den Reiter «Config Settings». Hier findest du das Feld «TEENSY COM PORT».
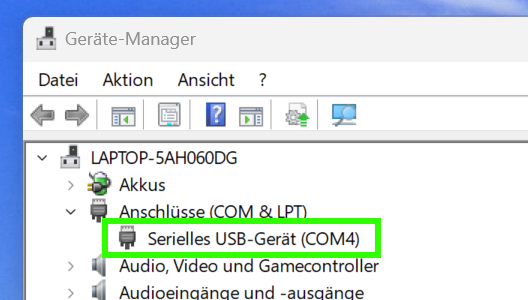
Um die Nummer deines COM Ports herauszufinden, öffne den «Geräte-Manager» des PCs. Wähle dort den Eintrag Anschlüsse (COM & LPT) an, um eine Liste aller Geräte zu finden. Neben dem entsprechenden USB-Anschluss findest du die Nummer der Ports in Klammern.
Danach kannst du den Arm Kalibrieren. Das bedeutet, dass du den genauen Nullpunkt jeder Achse bestimmst.
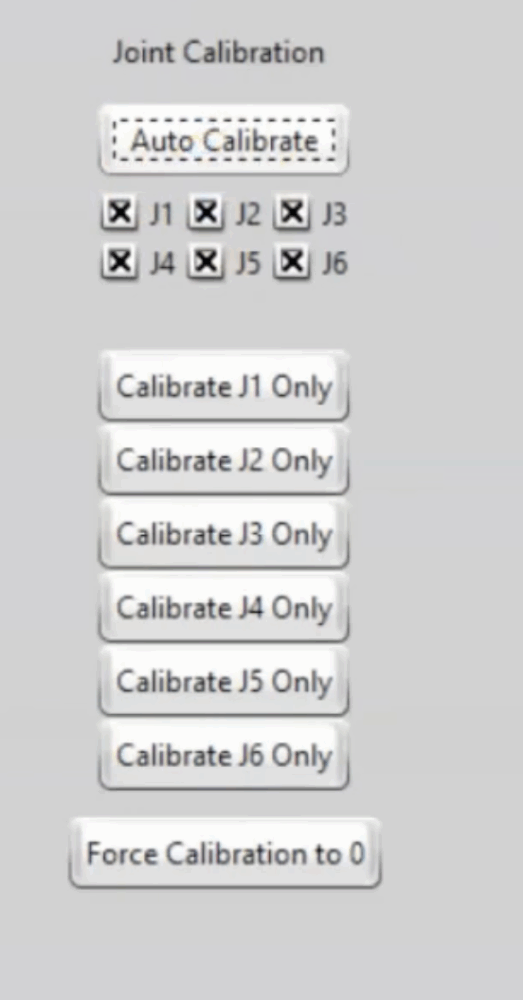
Drücke als erstes auf den Button «Auto Calibrate». Nun sollte sich der Arm anhand der Werte, die auf der rechten Seite angezeigt werden, ausrichten. Behalte den Roboter während dieses Prozesses im Auge. Achtung: Wenn es zu Problemen kommt (Kabel, die sich verheddern oder drohen, abzureissen; Kontakt der Maschine mit dem Tisch; Verbiegen von Limit-Switches, die nicht erkannt werden; etc.) schallte den Arm sofort ab.
Schaue dir den Roboter-Arm nun an. Sieht er aus wie unten aufgezeigt, oder gibt es Achsen, die verdreht sind? Wenn ja, müssen diese nachkalibriert werden.
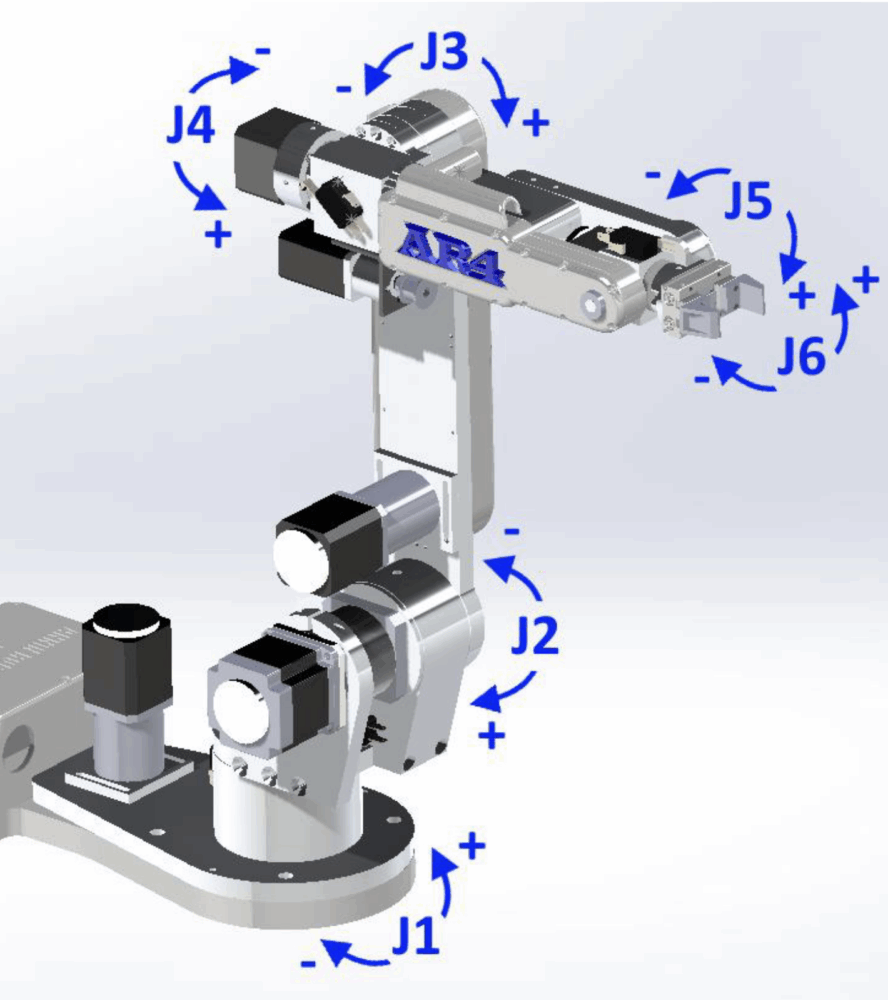 Dafür musst du zuerst herausfinden, welche Motoren neu eingestellt werden müssen. Im Diagram oben siehst du, welcher Motor welche Achse antreibt.
Dafür musst du zuerst herausfinden, welche Motoren neu eingestellt werden müssen. Im Diagram oben siehst du, welcher Motor welche Achse antreibt.
Nun kannst du bei den entsprechenden Achsen ein positives oder negatives Offset bestimmen. Um zu prüfen, ob das eingestellte Offset zum gewünschten Resultat führt, kannst du nun die entsprechenden Achsen einzeln nachkalibrieren in dem du «Calibrate Jx Only» klickst.
Diese Werte werden zwischen Sessions gespeichert, müssen aber manchmal angepasst werden.
Programierung
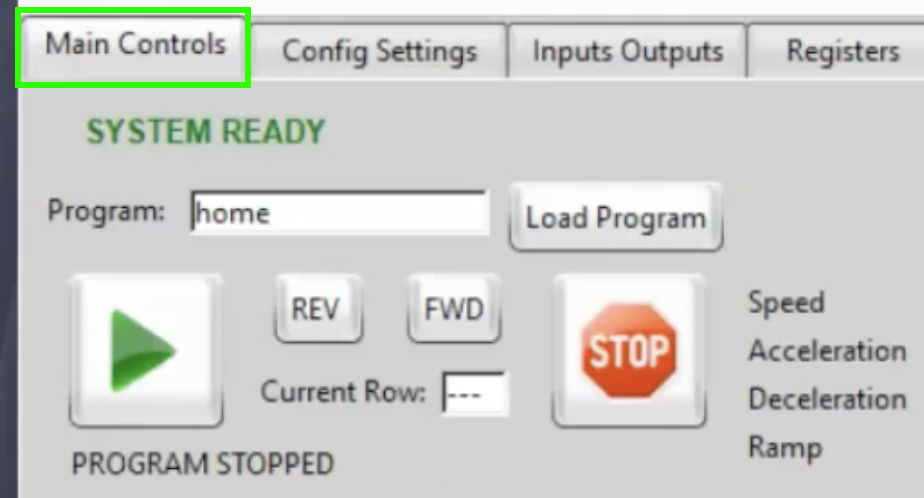
Um den Arm zu kontrollieren, musst du zurück in den Reiter «Main Controls».
 Wie du den Roboter von hier aus bewegen und programmieren kannst, erfährst du in diesem ausführlichen Video von Chris Annin:
Wie du den Roboter von hier aus bewegen und programmieren kannst, erfährst du in diesem ausführlichen Video von Chris Annin:
G-Code
Zusätzlich kann der Arm durch G-Code-Files ansteuert werden. G-Code ist eine Programmiersprache, die verwendet wird, einen vorgegebenen Pfad in eine Maschinenbewegung zu übersetzen. Dadurch kannst du den Arm auf einer waagrechten Plane eine Linie abfahren lassen. Denk zum Beispiel an eine Zeichenmaschine.
Eine ausführliche Video-Anleitung dazu findest du zusätzlich hier (englisch).
Bild vorbereiten
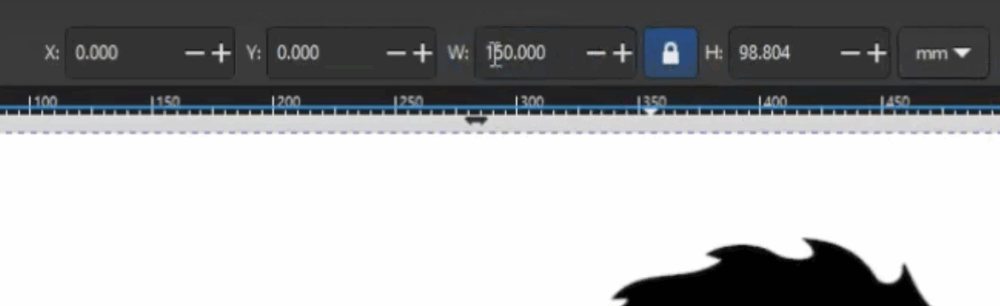
Downloade zuerst das Program Inkscape. Danach öffnest du dort das .jpg, mit dem du arbeiten möchten. Im ersten Schritt passt du die Größe des Bildes an. Ände oben im Software-Menü die Maßeinheit von Pixeln zu Millimetern und sperre dann das Seitenverhältnis.
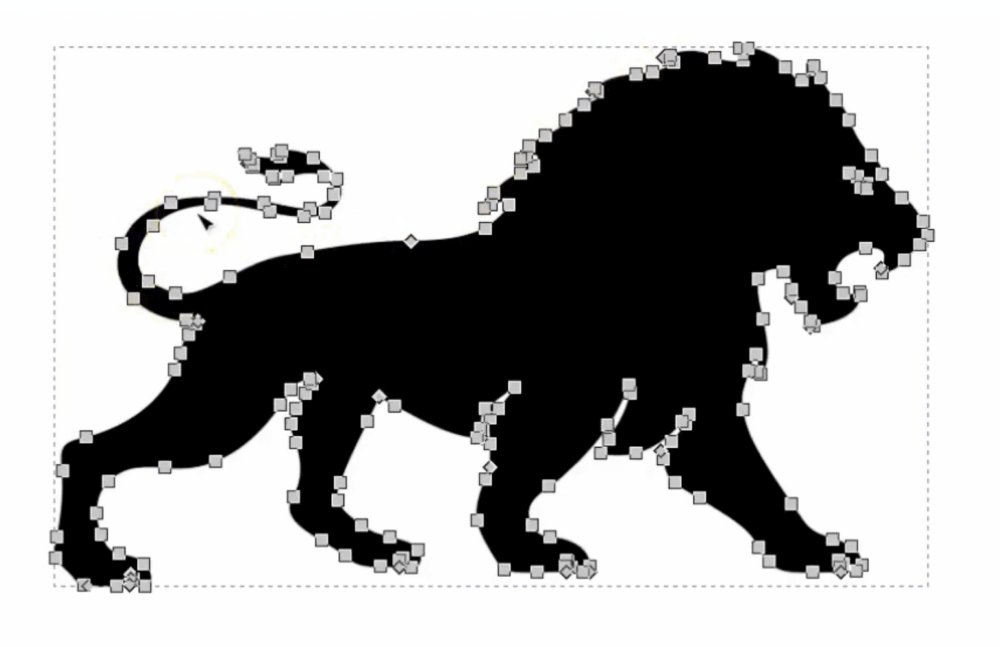
 Danach kannst du das Bild proportional auf die gewünschte Grösse skalieren. Anschliessend muss das Bild durch Nachzeichnen in einen Vektor umgewandelt werden. Klick dazu in der Menüleiste auf «Pfad» und wähle «Bitmap nachzeichnen». Die Einstellungen kannst du dabei auf ihren Standardwerten belassen. Wählen das Bild aus und klicke dann auf «Übernehmen». Dadurch wird ein Vektorpfad erstellt. Um zu überprüfen, ob die Nachzeichnung erfolgreich war, wähle in der Werkzeugleiste das Knotenwerkzeug aus. Du solltest nun Knoten sehen, die das Bildes umreissen.
Danach kannst du das Bild proportional auf die gewünschte Grösse skalieren. Anschliessend muss das Bild durch Nachzeichnen in einen Vektor umgewandelt werden. Klick dazu in der Menüleiste auf «Pfad» und wähle «Bitmap nachzeichnen». Die Einstellungen kannst du dabei auf ihren Standardwerten belassen. Wählen das Bild aus und klicke dann auf «Übernehmen». Dadurch wird ein Vektorpfad erstellt. Um zu überprüfen, ob die Nachzeichnung erfolgreich war, wähle in der Werkzeugleiste das Knotenwerkzeug aus. Du solltest nun Knoten sehen, die das Bildes umreissen.
 Wenn du mit dem Resultat zufrieden bist, speichere das Bild als SVG-Datei, indem du auf «Datei» und dann «Speichern unter» klickst und das .svg-Format auswählst.
Wenn du mit dem Resultat zufrieden bist, speichere das Bild als SVG-Datei, indem du auf «Datei» und dann «Speichern unter» klickst und das .svg-Format auswählst.
G-Code erstellen
Öffne als Nächstes deinen Browser und rufe JScut auf. Dabei handelt es cih einen kostenlosen, browserbasierten G-Code-Generator. Drücke auf „Open SVG“, wähle „Local“ und lade die soeben erstellte SVG-Datei hoch. Bevor du nun deinen G-Code generieren kannst, musst du einige Einstellungen anpassen. Ändern die Einheiten («Units») auf Millimeter. Stellen Sie die maximale Schnitttiefe («Max Cut Depth») auf 1 mm, den Werkzeugdurchmesser («Diameter») auf 1 mm und die Durchgangstiefe («Pass Depth») auf 1 mm ein. Die Materialstärke («Thickness») muss ebenfalls auf 1 mm eingestellt werden. Lege die Freihöhe («Clearance») auf 20 mm fest, um sicherzustellen, dass das Werkzeug zwischen den Schnitten richtig angehoben wird. Stelle auch sicher, dass die Option «Return to Zero at End» aktiviert ist. Sobald diese Einstellungen stimmen, klicke auf «Create Operation» und wähle entweder «Engrave» oder «Outside» aus. «Engrave» zeichnet die inneren Linien nach, während «Outside» dem Umriss des Bildes folgt.
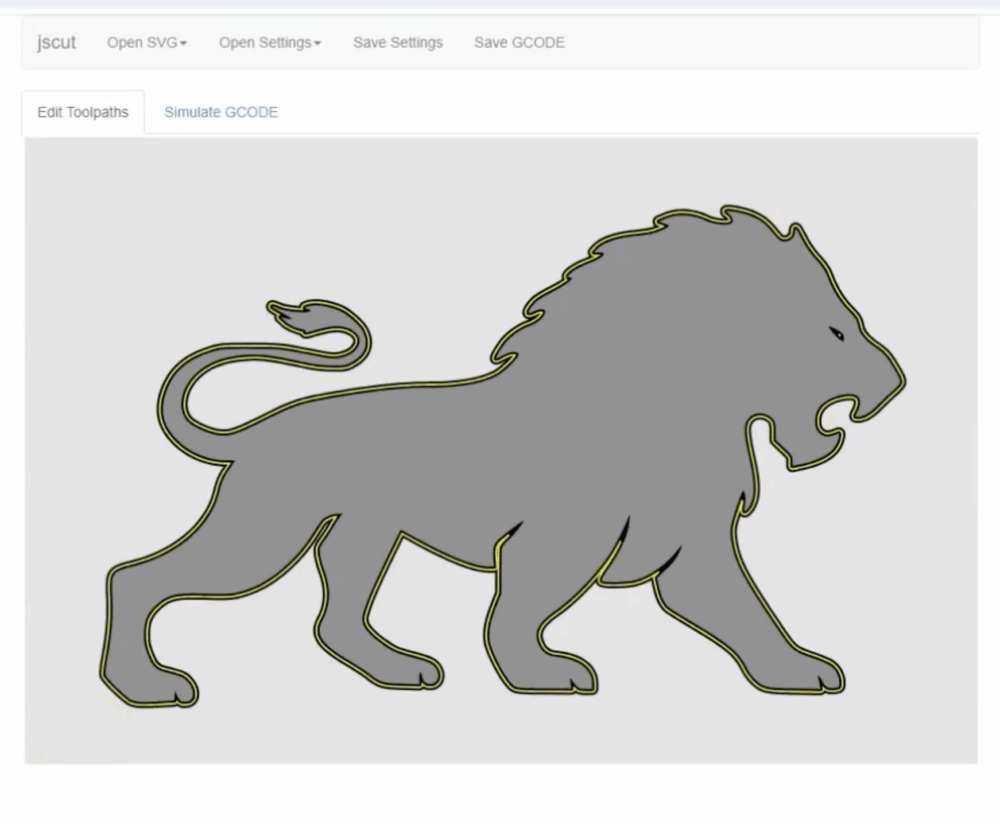 Klicke anschliessend auf «Generate». Die nachgezeichneten Pfade werden nun gelb hervorgehoben, um anzuzeigen, dass der Pfad erstellt wurden. Wähle schlussendlich «Save Gcode» aus, um die Datei herunterzuladen und auf deinem Desktop zu speichern.
Klicke anschliessend auf «Generate». Die nachgezeichneten Pfade werden nun gelb hervorgehoben, um anzuzeigen, dass der Pfad erstellt wurden. Wähle schlussendlich «Save Gcode» aus, um die Datei herunterzuladen und auf deinem Desktop zu speichern.
G-Code laden und Ausführen
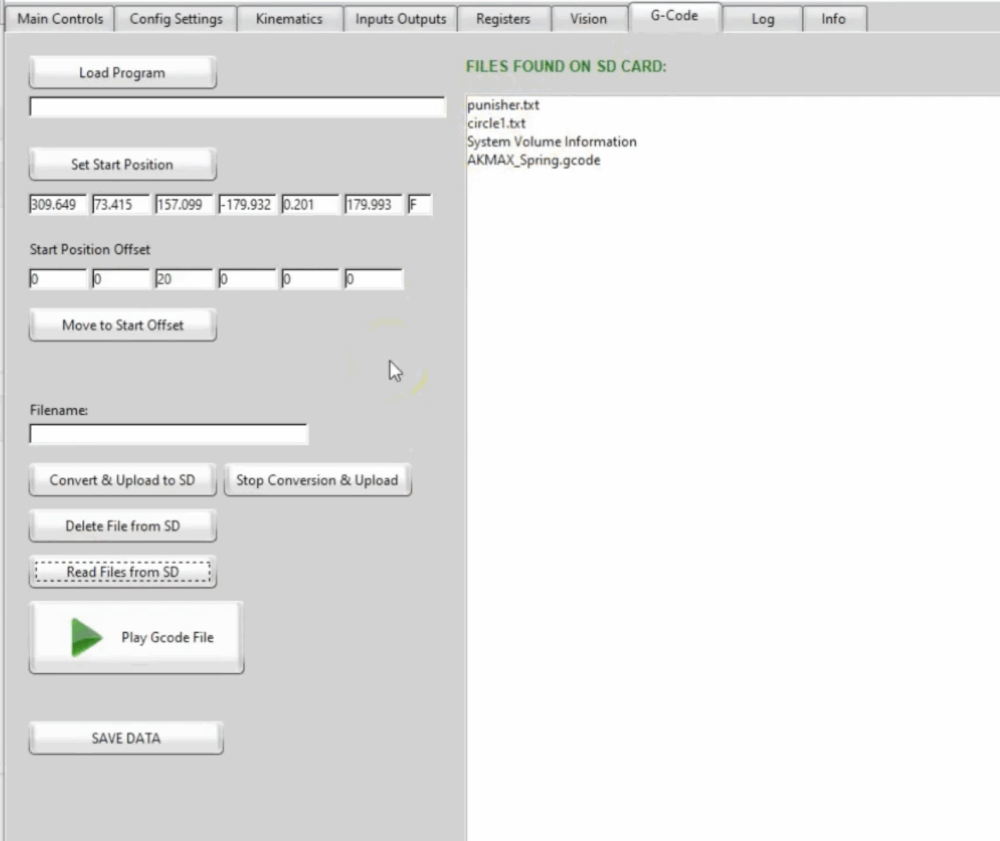
Nun laden wir unseren G-Code in die AR4-Software. Stecken dazu eine microSD-Karte in das Teensy-Board des Roboters. Öffnen dann die AR4-Software und gehen wähle den Reiter «G-Code». Bewege den Roboter an die gewünschte Startposition. Diese sollte der unteren linken Ecke der gewünschten Bildposition entsprechen. Sobald sich der Roboter in Position befindet, klicke Sie auf «Set Start Position». Stelle auch einen Z-AchsenVersatz («Z-axis offset») ein, um zu verhindern, dass dein Stift die Oberfläche berührt. Dafür eignet sich ein Wert von 20 mm. Klicke dann auf «Move to Start Offset», um die Position zu prüfen.
 Drücke nun auf „Load“, um deine G-Code-Datei hochzuladen. Nachdem du dem File einen Namen gegeben hast, kannst du auf » Convert and Upload to SD » klicken. Die Software konvertiert die gesamte G-Code-Datei Zeile für Zeile in lesbare Anweisungen für den Roboter und lädt diese anschliessend auf deine microSD-Karte. Je nach Dateigröße kann das einige Minuten dauern.
Drücke nun auf „Load“, um deine G-Code-Datei hochzuladen. Nachdem du dem File einen Namen gegeben hast, kannst du auf » Convert and Upload to SD » klicken. Die Software konvertiert die gesamte G-Code-Datei Zeile für Zeile in lesbare Anweisungen für den Roboter und lädt diese anschliessend auf deine microSD-Karte. Je nach Dateigröße kann das einige Minuten dauern.
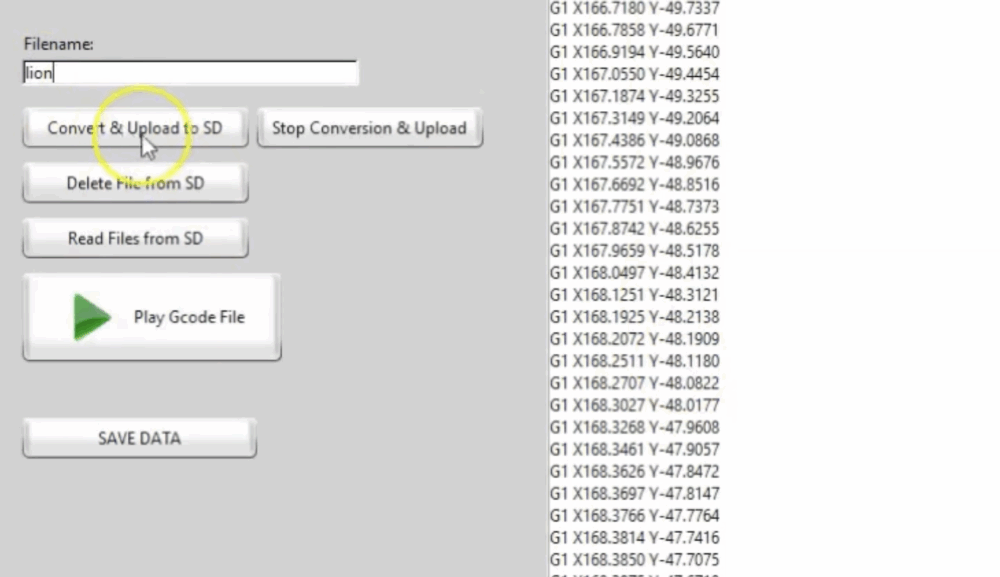 Klicken nach Abschluss der Konvertierung auf «Read Files from SD», um zu überprüfen, ob dein Code erfolgreich hochgeladen wurde. Wähle die Datei aus und klicke dann auf «Play Gcode File», um das Programm auszuführen.
Klicken nach Abschluss der Konvertierung auf «Read Files from SD», um zu überprüfen, ob dein Code erfolgreich hochgeladen wurde. Wähle die Datei aus und klicke dann auf «Play Gcode File», um das Programm auszuführen.